Isometric Registration of Ambiguous and Partial Data
Abstract
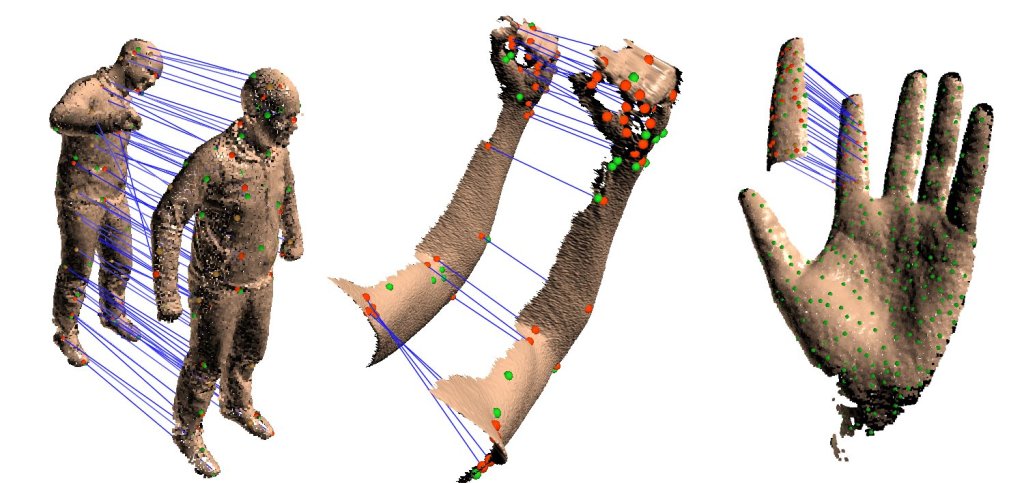
This paper introduces a new shape matching algorithm for computing correspondences between 3D surfaces that have undergone (approximately) isometric deformations. The new approach makes two main contributions: First, the algorithm is, unlike previous work, robust to ``topological noise'' such as large holes or ``false connections'', which is both observed frequently in real-world scanner data. Second, our algorithm samples the space of feasible solutions such that uncertainty in matching can be detected explicitly. We employ a novel randomized feature matching algorithm in order to find robust subsets of geodesics to verify isometric consistency. The paper shows shape matching results for real world and synthetic data sets that could not be handled using previous deformable matching algorithms.
Keywords:
feature matching, registration, ransac, dense features, point cloud matching
 Read Paper (~2MB)
- 6542 times clicked
Read Paper (~2MB)
- 6542 times clicked
Videos
 Submission version 640x480, ~30MB, (H.264,
Quicktime 7.1 compatible)
- 2756 times clicked
Submission version 640x480, ~30MB, (H.264,
Quicktime 7.1 compatible)
- 2756 times clicked
Bibliography
A. Tevs, M. Bokeloh, M. Wand, A. Schilling, H.-P. Seidel, "Isometric Registration of Ambiguous and Partial Data" , IEEE Computer Society Conf. on Computer Vision and Pattern Recognition (CVPR'09), 2009, to appear. [bibtex]
@inproceedings{TevsCVPR2009,
author = {Tevs, Art and Bokeloh, Martin and Wand, Michael and Schilling, Andreas and Seidel, Hans-Peter},
title = {Isometric Registration of Ambiguous and Partial Data},
booktitle = {IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR 2009)},
publisher = {IEEE Computer Society},
year = {2009},
pages = {toappear},
address = {Miami Beach, Florida, USA},
}